| |
Solicitud de hoja para aplicación de Sensor de Colisión
(MS Excel)
Para tener éxito en su solicitud, el Protector escogido debe ser apropiadamente medido. Para elegir un modelo, consideré las cargas producidas debido al peso estático de la herramienta, la inercia de cargas impuestas por el movimiento del robot y la carga producida por el efector final en el desempeño de su tareas. Una vez que estas cargas se calculan y un modelo específico es escogido, la presión nominal ajustada por el punto de rompimiento puede ser determinado. El necesario ajuste de la presión del aire debe ser de fácil acceso con una amplia adaptabilidad. Por ejemplo, un ajuste de la presión calculada de 50 psi deben tener un rango ajustable de 25-75 psi.
El proceso de selección es como sigue:
La Figura 1 se puede utilizar para convertir las fuerzas que actúan sobre el efector final de herramientas en cargas resultante de momento, axiales y de torsión aplicadas al protector. Utilice el diagrama que se muestra en la figura 1 y las fórmulas para calcular la carga aplicada en el peor caso para su aplicación. Los tres casos de carga Axial , Torsión y Momento deberán ser evaluadas en sus componentes de fuerza, Estática, dinámica, y de trabajo
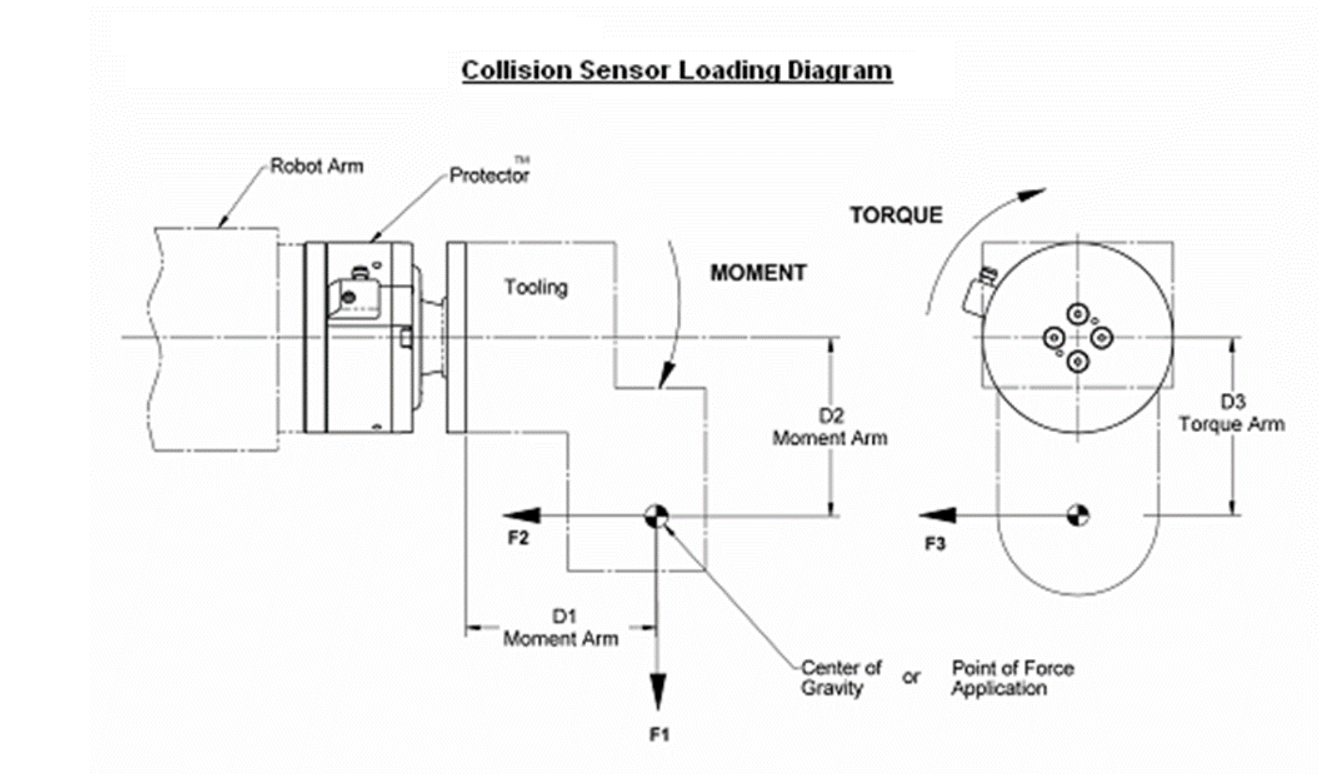 |
No todos los componenetes de fuerzas (Estática, Dinámica, y de Trabajo) están presentes durante las fases de el programa del robot. Como resultado, en el peor de los casos el momento de carga axial, de torsión y de momento pueden ocurrir en diferentes tiempos en el programa.
|
|
Carga axial (F)
|
= |
F2
|
|
Torsión (T)
|
= |
F3*D3
|
|
Momento (M)
|
= |
√( (F1*D1)2 + (F2*D2)2
)
|
(F1, F2, y F3 consiste en la suma de sus respectivos componentes de fueza: Dinámica, Estática y de Trabajo y siempre debe ser positiva para efectos de ajuste del cálculo de la presión de la ruptura
|
Es la carga aplicada por el peso de la herramienta mientras el brazo del robot está inactivo. Esto incluye el peso de todas las partes sujetadas al Protector, actuando en el centro de gravedad de montaje a lo largo de la dirección de la gravedad.
La fuerza de inercia impuesta en el centro de gravedad de la herramienta, debido a la aceleración del brazo del robot. Esta fuerza actúa en dirección opuesta del movimiento. Las fuerzas dinámicas son adheridas a la fuerzas estáticas y deben ser cuidadosamente consideradas para asegurar una medida correcta del protector
Fuerzas son generadas en un punto bajo condiciones de trabajo normales. Si esas fuerzas y su ubicación son conocidas, ellas pueden ser convertidas en cargas en el Protector usando la misma técnica.
Una vez que las cargas aplicadas son conocidas en el paso uno, elija un modelo que tenga un momento nominal y de torsión ranqueada arriba de las cargas calculadas debajo de estas dos condiciones: la dinámica y de trabajo
Para un determinado modelo con las cargas conocido, él necesario ajuste de la presión se puede aproximar a partir de la siguiente fórmula:
P = PM + PT + PF
Cuando PM, PT, y PF son los componenete de presión relacionados a los componenetesde carga de momento, torsión, y fuerza previstos en el rompimiento. PM, PT, y PF son calculados usando las fórmulas en la siguiente tabla, donde M, T, y F son las cargas esperadas en los ajustes de presión de rompimiento
(Medidas Inglesas: lb-in, psi, lb)
|
Haga clic en cualquiera de los encabezados de la tabla para ordenar la información en esa columna.
| Modelo | Momento | Torsión | Axial |
| SR-48 | (M x 1.782) - 7.6 | (T x 1.519) - 2.3 | F x 0.926 |
| SR-61 | (M x 0.376) - 3.3 | (T x 0.444) - 6.3 | F x 0.462 |
| SR-81 | (M x 0.172) - 0.2 | (T x 0.168) - 0.8 | F x 0.233 |
| SR-82 | (M x 0.172) - 0.2 | (T x 0.168) - 0.8 | F x 0.233 |
| SR-101 | (M x 0.085) | (T x 0.081) - 2.8 | F x 0.147 |
| SR-131 | (M x 0.030) | (T x 0.033) - 1.7 | F x 0.085 |
| SR-176 | (M x 0.013) | (T x 0.012) - 2.4 | F x 0.045 |
| SR-221 | (M x 0.0052) | (T x 0.0065) + 7.3 | F x 0.029 |
|
Unidades Métricas: N-m, Bar, N
|
Haga clic en cualquiera de los encabezados de la tabla para ordenar la información en esa columna.
| Modelo | Momento | Torsión | Axial |
| SR-48 | (M x 1.0874) - 0.5 | (T x 0.9267) - 0.2 | F x 0.01435 |
| SR-61 | (M x 0.2294) - 0.2 | (T x 0.2708) - 0.4 | F x 0.00719 |
| SR-81 | (M x 0.1052) | (T x 0.1027) - 0.1 | F x 0.00361 |
| SR-82 | (M x 0.1052) | (T x 0.1027) - 0.1 | F x 0.00361 |
| SR-101 | (M x 0.0517) | (T x 0.0495) - 0.2 | F x 0.00228 |
| SR-131 | (M x 0.0183) | (T x 0.0199) - 0.1 | F x 0.00132 |
| SR-176 | (M x 0.0077) | (T x 0.0075) - 0.2 | F x 0.00070 |
| SR-221 | (M x 0.0032) | (T x 0.0040) + 0.5 | F x 0.00045 |
|
Para un Protector modelo SR-81 con un momento de 100 libras por pulgada, una torsión de 50 libras por pulgada, una carga axial de 20 libras, y una aceleración de 2 G, la presión de ajuste se calcula como sigue:
P = ((100*0.172) - 0.2) + ((50*0.168) - 0.8) + (20*0.233) + ((100*2*0.172) - 0.2)
= 17 + 7.6 + 4.66 + 34.2
= 63.46
Se requiere un ajuste de presión de aire nominal de 63 psi
|
|