| |
衝突センサアプリケーションワークシート
(MS Excel)
成功しているアプリケーションでは、選んだプロテクタのサイズ選択が適切であるはずです。モデルを選択するには、ツーリングの静的重量により生じる荷重、ロボットの運動によりかかる慣性荷重、意図するタスクを実行中のエンドエフェクタにより生成する荷重を考慮します。これらの荷重を計算し、特定のモデルを選定したら、ブレイクアウェイポイントにおける公称圧力設定を求められます。調節性が十二分にあるため、求めた空気圧設定はすぐに利用できるはずです。例えば、計算された圧力設定が50 psiの場合、調節範囲は25~75 psiです。
選択プロセスは次のとおりです。
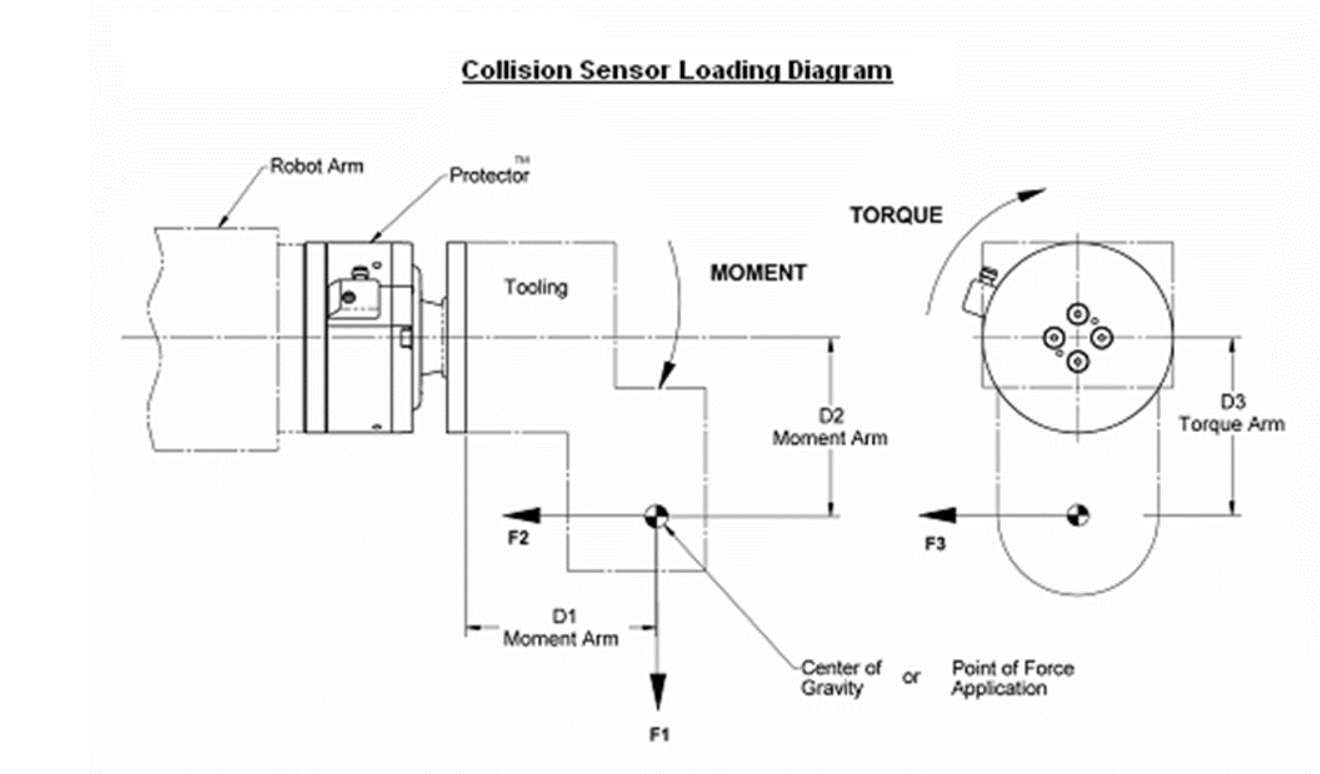
図1を用いて、エンドエフェクタツーリングに作用する力を、結果としてプロテクタにかかるモーメント、トルク、軸荷重に変換できます。図1に示される線図とその下の計算式を用いて、お客様のアプリケーションの最悪ケースでかかる荷重を計算してください。軸、トルク、モーメントの3つの荷重すべてについて、静的、動的、稼動中の分力を評価してください。
 |
すべての分力(静的、動的、稼動中)がロボットプログラムのすべてのフェイズに存在するわけではありません。結果として、プログラム上では、さまざまなタイミングで軸、トルク、モーメント荷重の最悪のケースの状況が起こり得ます。
|
|
軸荷重(F)
|
= |
F2
|
|
トルク(T)
|
= |
F3*D3
|
|
モーメント(M)
|
= |
√( (F1*D1)2 + (F2*D2)2
)
|
(F1、F2、F3は、それぞれの静的、動的、稼動中分力の合計から構成され、ブレイクアウェイ圧力設定を計算するためには、必ず正となります。)
|
ロボットアームがアイドル中にツーリング重量によりかかる荷重です。これには、アセンブリの重心に重力方向に沿って作用する、プロテクタに取り付けている全部品の重量が含まれます。
ロボットアームの加速により、ツーリングの重心に慣性力がかかります。この力は運動の逆方向に作用します。動的力が静的力に追加されますので、プロテクタのサイズが適切であるようにするため、動的力を注意深く検討しなければなりません。
正常な稼働状況でツール先端に生じる力です。これらの力とその位置がわかったら、同様にして、プロテクタにかかる荷重に換算できます。
ステップ1でおおよその荷重がわかったら、動的および稼動中状況の両方において計算した荷重を超える公称モーメントとトルクの定格を備えたモデルを選定します。
与えられたモデルで荷重がわかっている場合、必要な圧力設定は次式により概算できます。
P = PM + PT + PF
ここで、PM、PT、PFは、ブレイクアウェイ時に予測されるモーメント、トルク、力の荷重成分に関係する分圧です。PM、PT、PFは次表の式を用いて計算します。ここで、M、T、Fは設定圧力のブレイクアウェイ時に予測される荷重です。
(英国単位: ポンド-インチ、psi、ポンド)
|
表の見出しをクリックすると、その列のデータで並べ替えます。
| モデル | モーメント | トルク | 軸 |
| SR-48 | (M x 1.782) - 7.6 | (T x 1.519) - 2.3 | F x 0.926 |
| SR-61 | (M x 0.376) - 3.3 | (T x 0.444) - 6.3 | F x 0.462 |
| SR-81 | (M x 0.172) - 0.2 | (T x 0.168) - 0.8 | F x 0.233 |
| SR-82 | (M x 0.172) - 0.2 | (T x 0.168) - 0.8 | F x 0.233 |
| SR-101 | (M x 0.085) | (T x 0.081) - 2.8 | F x 0.147 |
| SR-131 | (M x 0.030) | (T x 0.033) - 1.7 | F x 0.085 |
| SR-176 | (M x 0.013) | (T x 0.012) - 2.4 | F x 0.045 |
| SR-221 | (M x 0.0052) | (T x 0.0065) + 7.3 | F x 0.029 |
|
(メートル系単位: N-m、Bar、N)
|
表の見出しをクリックすると、その列のデータで並べ替えます。
| モデル | モーメント | トルク | 軸 |
| SR-48 | (M x 1.0874) - 0.5 | (T x 0.9267) - 0.2 | F x 0.01435 |
| SR-61 | (M x 0.2294) - 0.2 | (T x 0.2708) - 0.4 | F x 0.00719 |
| SR-81 | (M x 0.1052) | (T x 0.1027) - 0.1 | F x 0.00361 |
| SR-82 | (M x 0.1052) | (T x 0.1027) - 0.1 | F x 0.00361 |
| SR-101 | (M x 0.0517) | (T x 0.0495) - 0.2 | F x 0.00228 |
| SR-131 | (M x 0.0183) | (T x 0.0199) - 0.1 | F x 0.00132 |
| SR-176 | (M x 0.0077) | (T x 0.0075) - 0.2 | F x 0.00070 |
| SR-221 | (M x 0.0032) | (T x 0.0040) + 0.5 | F x 0.00045 |
|
SR-81でモーメントが100ポンド-インチ、トルクが50ポンド-インチ、軸荷重が20ポンド、加速度が2 Gの場合、圧力設定は次のように計算します。
P = ((100*0.172) - 0.2) + ((50*0.168) - 0.8) + (20*0.233) + ((100*2*0.172) - 0.2)
= 17 + 7.6 + 4.66 + 34.2
= 63.46
公称空気圧設定63 psiが必要です。
|
|