| |
防碰撞传感器应用表
(微软的 Excel)
一个成功的应用,要选择尺寸合适的碰撞传感器。选碰撞传感器的时候要考虑工件重量,机器人运动造成的惯性载荷,工件在工作过程中产生的载荷。一旦这些都计算好了,就可以确定传感器型号了,同时也可以确定跳变点的设定压力 。跳变点设定的压力最好是可调的。例如,计算的设定压力是50psi,调压范围应该是25-75psi。
选择过程如下:
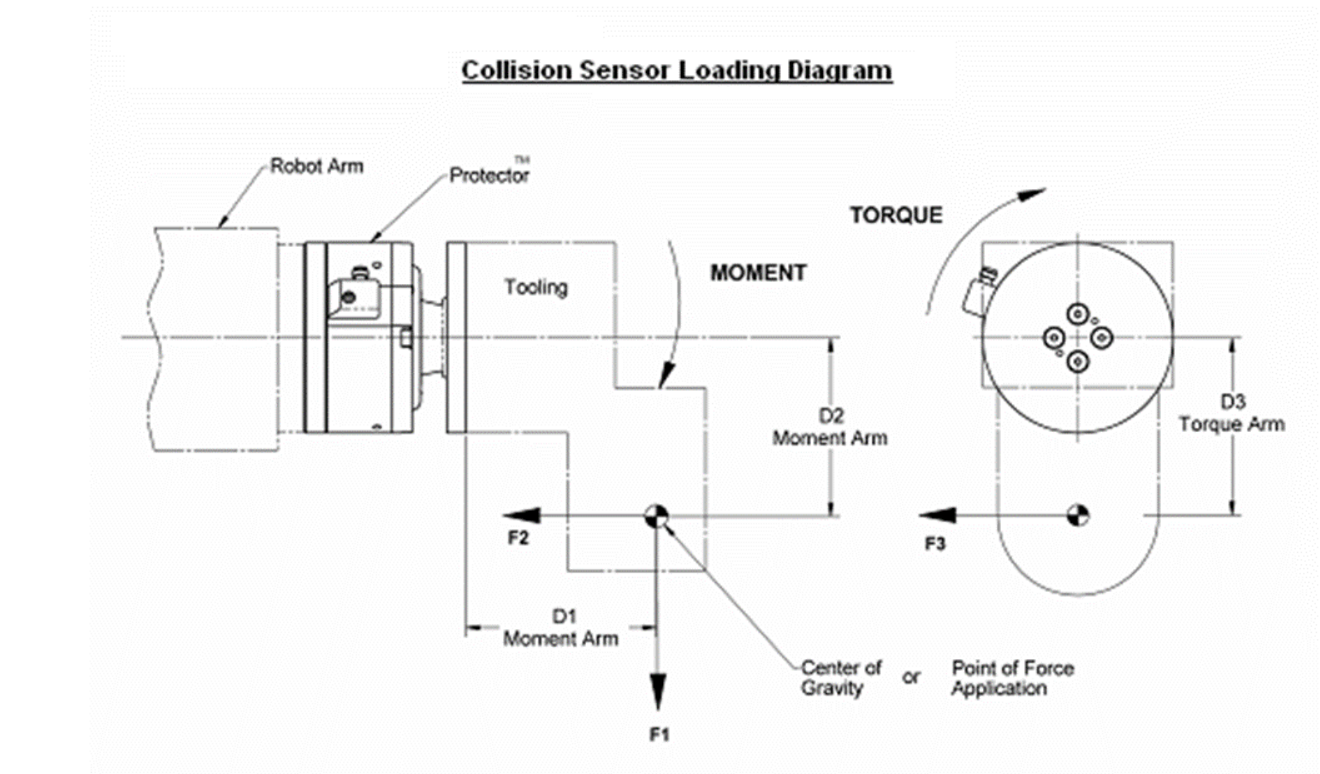
通过图1,能够将力转换成末端执行工具施加到碰撞传感器上的合力矩,转矩,以及轴向负载。利用图1的曲线和下面的公式来计算最差情况下的负载。所有三个量-轴向负载,转矩和剪切力矩-都应该考虑其动态的,静态的,以及合力的作用情况。
 |
不是所有的分作用力(静态的,动态的,和工作的)在机器人作业的整个过程中都会出现。结果就是,轴向,转矩,剪切力矩最差的情况会在机器人程序的不同时间段出现。
|
|
轴向负载(F)
|
= |
F2
|
|
转矩(T)
|
= |
F3*D3
|
|
力矩(M)
|
= |
√( (F1*D1)2 + (F2*D2)2
)
|
(F1,F2,F3为各自动态,静态和分作用力的合力;计算跳变压力时必须考虑。)
|
机器人手臂静止时,工具重量施加的载荷。这包含连接到传感器上所有部件的总重,沿着重力的方向作用在重心位置。
由于机器人手臂加速,会在工具重心位置增加惯性力。这个力作用方向与运动方向相反。动态力和静态力叠加,必须加以考虑来保证选择合适的碰撞传感器。
正常工作的情况下,在工具的边沿产生的作用力。如果这些力的大小和作用点已知,就可以用同样地技巧将其转换成对碰撞传感器的载荷。
通过步骤1确定近似的负载后,选择动态和静态力矩和转矩都要大于计算值的碰撞传感器。
对一个负载已知的既定型号的碰撞传感器,可以通过下面的公式计算设定压力:
P = PM + PT + PF
这里用PM,PT,PF分别表示剪切力矩,转矩和轴向载荷在跳变点时的期望值。用下面表格中的公式计算PM,PT和PF,这里的M,T,F指的是跳变点时的期望值。
(英制单位:lb-in,psi,lb)
|
点击任意一个表头按这个表格的数据进行分类排序
| 型号 | 力矩 | 转矩 | 轴 |
| SR-48 | (M x 1.782) - 7.6 | (T x 1.519) - 2.3 | F x 0.926 |
| SR-61 | (M x 0.376) - 3.3 | (T x 0.444) - 6.3 | F x 0.462 |
| SR-81 | (M x 0.172) - 0.2 | (T x 0.168) - 0.8 | F x 0.233 |
| SR-82 | (M x 0.172) - 0.2 | (T x 0.168) - 0.8 | F x 0.233 |
| SR-101 | (M x 0.085) | (T x 0.081) - 2.8 | F x 0.147 |
| SR-131 | (M x 0.030) | (T x 0.033) - 1.7 | F x 0.085 |
| SR-176 | (M x 0.013) | (T x 0.012) - 2.4 | F x 0.045 |
| SR-221 | (M x 0.0052) | (T x 0.0065) + 7.3 | F x 0.029 |
|
(公制单位:N-m,Bar,N)
|
点击任意一个表头按这个表格的数据进行分类排序
| 型号 | 力矩 | 转矩 | 轴 |
| SR-48 | (M x 1.0874) - 0.5 | (T x 0.9267) - 0.2 | F x 0.01435 |
| SR-61 | (M x 0.2294) - 0.2 | (T x 0.2708) - 0.4 | F x 0.00719 |
| SR-81 | (M x 0.1052) | (T x 0.1027) - 0.1 | F x 0.00361 |
| SR-82 | (M x 0.1052) | (T x 0.1027) - 0.1 | F x 0.00361 |
| SR-101 | (M x 0.0517) | (T x 0.0495) - 0.2 | F x 0.00228 |
| SR-131 | (M x 0.0183) | (T x 0.0199) - 0.1 | F x 0.00132 |
| SR-176 | (M x 0.0077) | (T x 0.0075) - 0.2 | F x 0.00070 |
| SR-221 | (M x 0.0032) | (T x 0.0040) + 0.5 | F x 0.00045 |
|
SR-81承受100 lb-in的剪切力矩,50 lb-in转矩和20lbs的轴向负载,加速度为2G时,压力计算如下:
P = ((100*0.172) - 0.2) + ((50*0.168) - 0.8) + (20*0.233) + ((100*2*0.172) - 0.2)
= 17 + 7.6 + 4.66 + 34.2
= 63.46
标称气压需要设定在63psi
|
|