| |
Folha de Trabalho de Aplicação do Sensor de Colisão
(MS Excel)
Para uma aplicação bem sucedida, o Protetor escolhido deve ser dimensionado de forma adequada. Para escolher um modelo, considere as cargas produzidas devido ao peso estático do ferramental, as cargas inerciais impostas pelo movimento do robô e as cargas produzidas pelo efetor quando executa as tarefas pretendidas. Uma vez que essas cargas tenham sido calculadas e um modelo específico foi escolhido, o ajuste de pressão nominal para o ponto de soltura pode ser determinado. O ajuste necessário de pressão de ar precisa estar disponível prontamente com ampla ajustabilidade. Por exemplo, um ajuste de pressão calculado de 50 psi deve ter uma faixa de ajuste de 25-75 psi.
O processo de seleção será como segue:
A figura 1 pode ser utilizada para converter as forças agindo sobre o ferramental no efetor em um momento, torque e carga axial resultantes aplicados ao Protetor. Use o diagrama mostrado na Figura 1 e as fórmulas abaixo para calcular as cargas aplicadas, no pior cenário possível, em sua aplicação. Todos os três casos de carga - Axial, Torque e Momento - devem ser avaliados pelos seus componentes de força Estática, Dinâmica e de Trabalho.
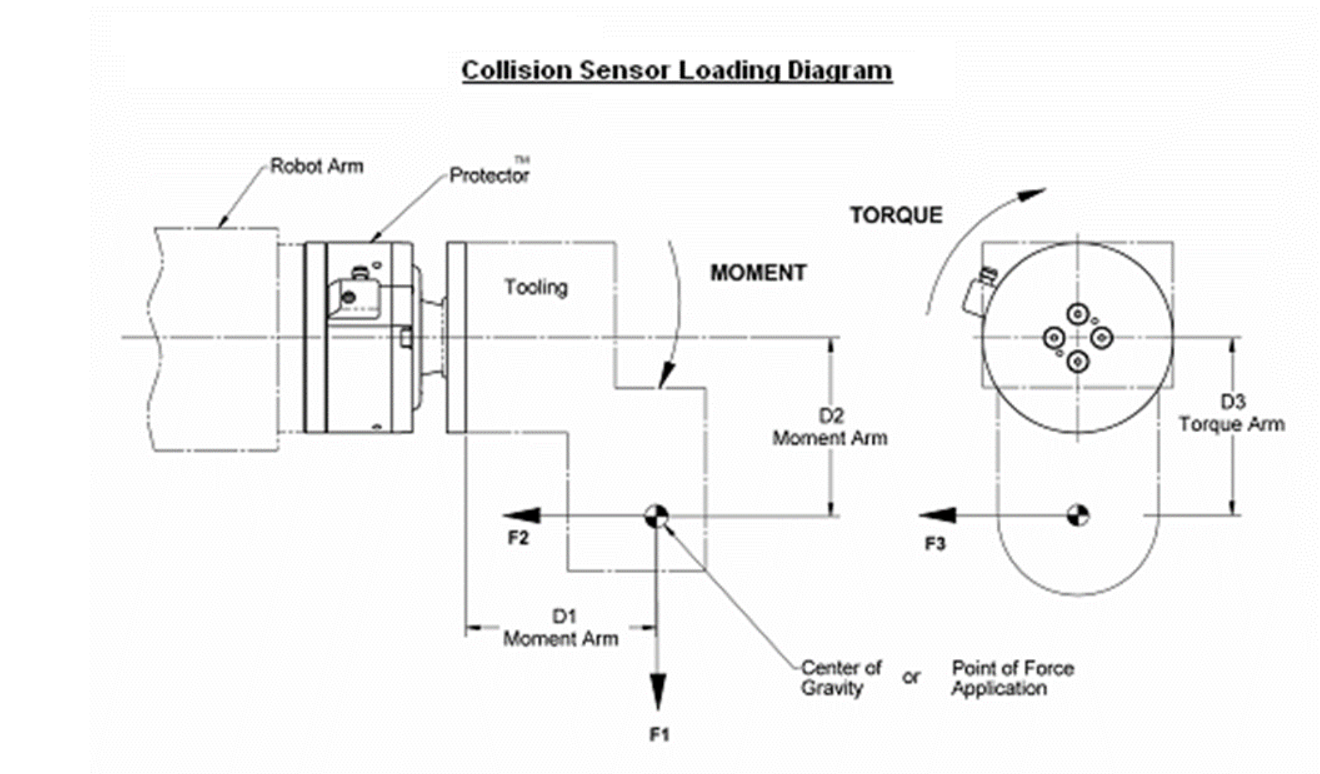 |
Nem todas as forças de componentes (Estática, Dinâmica e de Trabalho) estão presentes durante todas as fases do programa do robô. Como resultado, as condições no pior cenário possível para cargas Axial, de Torque e Momento podem ocorrer em momentos diferentes no programa.
|
|
Carga Axial (F)
|
= |
F2
|
|
Torque (T)
|
= |
F3*D3
|
|
Momento (M)
|
= |
√( (F1*D1)2 + (F2*D2)2
)
|
(F1, F2 & F3 consistem da soma de suas respectivas forças de componente Estática, Dinâmica e de Trabalho; e deve sempre ser positivo para propósitos do cálculo de ajuste de pressão de rompimento.)
|
A força aplicada pelo peso do ferramental enquanto o braço do robô estiver ocioso. Isso inclui o peso de todas as peças fixadas no Protetor, agindo no centro de gravidade da montagem ao longo da direção da gravidade.
A força inercial imposta pelo centro de gravidade do ferramental devida à aceleração do braço do robô. Essa força age na direção oposta do movimento. As forças dinâmicas são aditivas às forças estáticas e precisam ser cuidadosamente consideradas para assegurar a escolha certa do tamanho do protetor.
As forças são geradas na ponta da ferramenta sob condições normais de trabalho. Caso estas forças e sua localização sejam conhecidas, elas podem ser convertidas em cargas no Protetor utilizando a mesma técnica.
Uma vez que as cargas aproximadas tenham sido determinadas na etapa 1, escolha um modelo que possua um momento nominal e índice de torque acima das cargas calculadas em ambas as condições, dinâmica e de trabalho.
Para um dado modelo com cargas conhecidas, o ajuste de pressão necessário pode ser obtido por aproximação através da seguinte fórmula:
P = PM + PT + PF
Onde PM, PT e PF são os componentes de pressão relacionados ao momento, torque e força de carga esperado no momento do rompimento. PM, PT e PF são calculados utilizando as fórmulas nas seguintes tabelas, onde M, T e F são as cargas esperadas para a pressão de rompimento ajustada.
(Unidades Inglesas: lb-in, psi, lb)
|
Clique sobre qualquer um dos títulos das tabelas para classificar os dados da coluna.
| Modelo | Momento | Torque | Axial |
| SR-48 | (M x 1.782) - 7.6 | (T x 1.519) - 2.3 | F x 0.926 |
| SR-61 | (M x 0.376) - 3.3 | (T x 0.444) - 6.3 | F x 0.462 |
| SR-81 | (M x 0.172) - 0.2 | (T x 0.168) - 0.8 | F x 0.233 |
| SR-82 | (M x 0.172) - 0.2 | (T x 0.168) - 0.8 | F x 0.233 |
| SR-101 | (M x 0.085) | (T x 0.081) - 2.8 | F x 0.147 |
| SR-131 | (M x 0.030) | (T x 0.033) - 1.7 | F x 0.085 |
| SR-176 | (M x 0.013) | (T x 0.012) - 2.4 | F x 0.045 |
| SR-221 | (M x 0.0052) | (T x 0.0065) + 7.3 | F x 0.029 |
|
(Unidades Métricas: N-m, Bar, N)
|
Clique sobre qualquer um dos títulos das tabelas para classificar os dados da coluna.
| Modelo | Momento | Torque | Axial |
| SR-48 | (M x 1.0874) - 0.5 | (T x 0.9267) - 0.2 | F x 0.01435 |
| SR-61 | (M x 0.2294) - 0.2 | (T x 0.2708) - 0.4 | F x 0.00719 |
| SR-81 | (M x 0.1052) | (T x 0.1027) - 0.1 | F x 0.00361 |
| SR-82 | (M x 0.1052) | (T x 0.1027) - 0.1 | F x 0.00361 |
| SR-101 | (M x 0.0517) | (T x 0.0495) - 0.2 | F x 0.00228 |
| SR-131 | (M x 0.0183) | (T x 0.0199) - 0.1 | F x 0.00132 |
| SR-176 | (M x 0.0077) | (T x 0.0075) - 0.2 | F x 0.00070 |
| SR-221 | (M x 0.0032) | (T x 0.0040) + 0.5 | F x 0.00045 |
|
Para um SR-81 com um momento de 100 lb-in, torque de 50 lb-in e uma carga axial de 20 lbs, e uma aceleração de 2 G, o ajuste de pressão é calculado da seguinte forma:
P = ((100*0.172) - 0.2) + ((50*0.168) - 0.8) + (20*0.233) + ((100*2*0.172) - 0.2)
= 17 + 7.6 + 4.66 + 34.2
= 63.46
Um ajuste de pressão nominal de ar de 63 psi é necessário.
|
|