最悪のケースのアセンブリのミスアラインメントについて、許容誤差を調べます。
a.) お客様のアセンブリ装置が部品Aの位置決めをする許容誤差
b.) お客様のフィーダが部品Bの位置決めをする許容誤差
c.) ツーリングが部品Aをハンドリングする繰り返し性
d.) 部品Bの形状(穴など)の位置の許容誤差
e.) コンペンセータの繰り返し性は、垂直位置で±0.002インチです。
アセンブリのミスアラインメント(最悪ケース) = a) + b) + c) + d) + e)
クリアランスの合計を求めます。
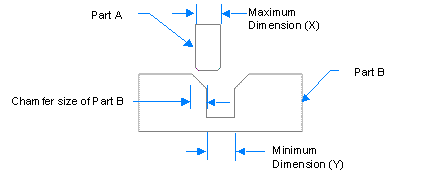
a.) 部品Aの面取りサイズ(少なくとも片側の部品にリードイン形状が必要です。)
b.) 部品Bの面取りサイズ
c.) 最悪ケースの部品のクリアランス。YからXを減算します。
クリアランスの合計 = a) + b) + c)
-
コンペンセータは、アセンブリのミスアラインメントが部品のクリアランスより大きい場合に必要となります。
-
クリアランスの合計は、アセンブリのミスアラインメントより広くなければなりません。そうしないと、平行な2つの面が接触します。クリアランスの合計がアセンブリのミスアラインメントより小さい場合は、部品Aまたは部品B、あるいはその両方の面取りサイズを大きくしてください。
-
許容ミスアラインメントがアセンブリのミスアラインメントより大きいコンペンセータを選択します。
挿入軸が垂直ではない場合、シアーパッドが曲がって横方向とコッキングの振れが生じるため、ツーリングと部品の重量によるコンペンセータの初期オフセットを考慮しなければなりません。こうすることで、下方向に許容されるミスアラインメントを低減しつつ、上方向には増加できます。